On 16th to 20th of October 2023, in Faaborg port, Denmark, MOSES team successfully conducted the MOSES Pilot 1 Demonstration: AutoDock.
Initially, the level of automation of the workboat (acting as a tugboat) was accessed within the harbor environment using all its integrated sensors through its Auto Pilot. In parallel the functionalities and the level of automation of the Automoor Unit was examined and tested. Consequently, the communication between all actors was established and tested, which was followed by the main demonstration.
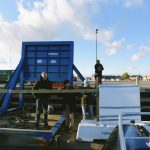
During the demonstration, TRELL showcased the ability of the AutoMoor unit to autonomously moor a barge (acting as a containership). This barge, with a built-in structure manufactured by AST (mimicking a vessel’s wall) was tugged from a predefined point by two TUCO workboats, one of them being fully autonomous. Both workboats were acting as a swarm, constantly exchanging data between them and the AutoMoor unit (when a specific mooring distance was achieved). The autonomous tugboat was retrofitted with various sensors by NTUA and ESI, which were feeding the workboat’s Auto Pilot developed by CORE. The ability of a STCS mock-up to monitor the process was also tested in real time by VPF.
The event agenda is available here.
Pilot 1 video is available here.
PHOTO GALLERY