
MOSES Concept
A large containership (mother-vessel) approaches a DSS port (or a large container terminal). Upon her arrival, she asks for assistance to safely moor at the dock. The assistance is provided by the MOSES AutoDock, a combined intelligent mega-system consisting of the MOSES Autonomous tugboat swarm for manoeuvring and the MOSES adapted AutoMoor system. The MOSES Autonomous tugboats are dispatched and assist the containership with the manoeuvring process in a swarm/cooperative formation. The MOSES autonomous tugboats are monitored through a remote-control station located in the DSS port (MOSES Shore Tugboat Control Station), which continuously monitors and gathers information about the process. The swarm of the tugboats automatically adapts its operation to the varying environmental conditions and the orders given by the Pilot of the large containership. As soon as the ship is on the right position at the dock, the AutoMoor system, intelligently communicates and cooperates with the swarm of the autonomous tugboats in order the ship to be safely docked, considering also the prevailed operational conditions. The automated docking process is also monitored through the MOSES Shore Tugboat Control Station. Upon the safe docking, the AutoMoor system verifies ship’s safe docking and informs the Tugboat Shore Control Station.
The containers’ loading and offloading processes are ready to start. Containers may need to be moved to their destination via hinterland connections (trucks and/or rail) or to be shipped to destinations near small ports (in mainland or island). For the first case, containers are stored to a dedicated port area (Storage area), waiting to be moved via trucks and/or rail. For the second case, containers are stacked by existing port equipment near dedicated berths of the DSS port and then are loaded on the MOSES Innovative Feeder Vessel, which is equipped with the MOSES Robotic Container-Handling System that provides (semi -) autonomous (off)loading of the feeder.
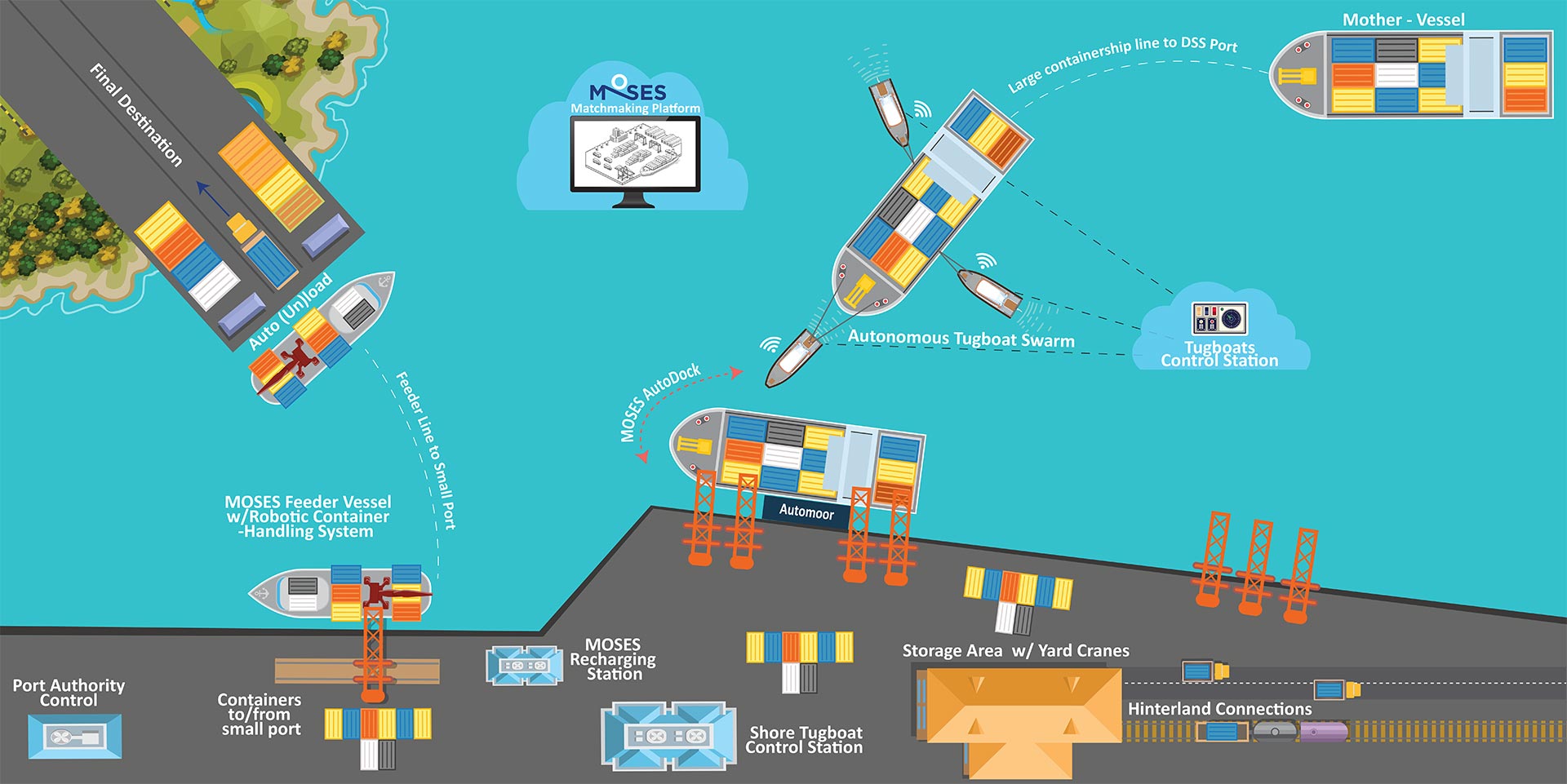
The Robotic Container-Handling System and the feeder are remotely monitored through a Shore Control Centre. The innovative feeder, while berthed at the DSS port, may use the MOSES Recharging Station, which is an automated shore-based power station. MOSES recharging station is also used for powering the tugboats. The laden MOSES Feeder proceeds with a reduced environmental footprint to the small port, which has no existing infrastructure to handle the containers’ (off)loading process. As soon as the MOSES innovative Feeder vessel approaches the small port, where her docking is achieved without the need of tugboats, she automatically unloads the containers by using the Robotic Container-Handling System, either at the quay or directly on trucks. As a result, ports with minimal or no available infrastructure may be effectively integrated in the container supply chain. The MOSES innovative feeder vessel, then, continues her voyage to the next small port or she returns to the DSS port. The feeder could partly autonomously, operate, with the support of the Shore Control Centre, during the sailing leg of the voyage.
Even though the cargo has been successfully transported to its destination, the continuity and sustainability of the feeder service require the necessary adaptation of the existing port operations and the balance between demand and supply. To this end, the MOSES concept is supported by the MOSES Matchmaking Platform to handle effectively the changing of the freight flows, to increase the cost-effectiveness of partial cargo loads and to boost last-mile/just-in-time connections among the transport modes and backhaul traffic.
Subscribe to our newsletter
Receive the most recent MOSES news and updates.