The MOSES AutoDock will constitute a mega-system consisting of autonomous tugboats that operate as a fully autonomous swarm and collaborate with automated docking infrastructure in order to automate the process of manoeuvring, docking and mooring a large containership in a DSS port. Although the system can operate using solely the swarm autonomous tugboats, the integration of the adapted AutoMoor system offers increased operational efficiency, environmental impact and accuracy in docking.
Autonomous tugboats swarm operation
The MOSES Autonomous tugboats will operate as a fully autonomous swarm (number of units depending on the size of the large containership) to manoeuvre and align the large containership to the dock by offsetting its course and velocity using micro-adjustments. The tugboats will be fitted with state-of-the-art sensors to enable autonomous navigation (payload, LIDAR, accelerometers, differential GNSS) and collision avoidance (swath multibeam sonar for seabed mapping), through suitable sensor fusion algorithms and the implementation of appropriate kinematic models.
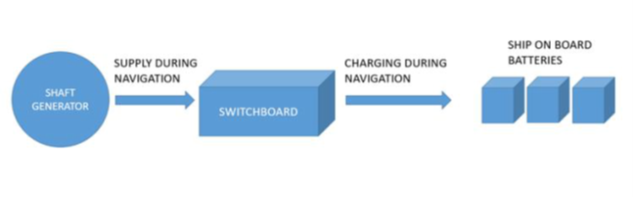
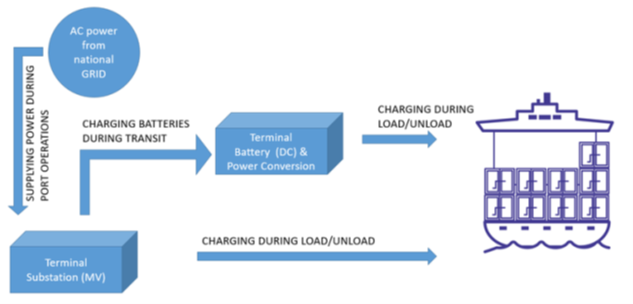
The project will use the ready-made remote-controlled workboats provided by TUCO, which will be adapted to enable autonomous tugboat operation and tested in real conditions. It should be noted that although tugboats are not designed from scratch within MOSES and emphasis is given on their autonomous operation, it is envisaged that in the future they will also have a hybrid electric propulsion that will be matched to their operational profile. Thus, the MOSES Recharging Station feasibility study will also address the tugboat operational profile besides the hybrid electric feeder vessel. Within this project, a Control Station for the autonomous tugboats will also be developed.
Automated docking infrastructure
The MOSES project will use automated mooring systems that will intelligently collaborate with the autonomous tugboats to manage the approach of the ocean-going ship to the berth in a fully automated manner. The MOSES automated mooring system (AutoMoor) will be based on an existing work of Trelleborg that will be adapted in the context of the project.
The system comprises an automated vacuum-based mooring system that aims at replacing mooring lines (hands-free mooring) and sensors for situational awareness control a vessel damping system that reduces vessel motions at berth.

Trelleborg AutoMoor system for automated mooring (left) and a conceptual adaptation for small vessels (right) (Source: Trelleborg)